Field Robotics
ISLab has been developing, together with the Mobile Robotics Lab, and under the Theme B of ISR – Associate Lab, field robotics activities and applications, motivated by their novel scientific and technical challenges (such as the cooperation among land and aerial robots, and among robots and humans, in unstructured, frequently outdoors, scenarios), relevance for public policies, and potential for innovative results on unstructured environments blending sound theory and technological developments. The work has been driven so far by applications to search and rescue, as well as urban, scenarios.
Initial work in field robotics comprised Search and Rescue (SAR) scenarios as a unifying testbed for diverse research approaches, ranging from the construction of new platforms, up to high-level coordination of mixed initiative human/robot teams. This sections enumerates these activities in a chronological sequence.
The DURABLE project has been focussed on accelerating the deployment of renewable energies in the Atlantic area through the validation and demonstration of previously developed aerospace technologies applied in robotics for operation and maintenance activities in wind and solar energy systems. The supporting robots were designed to perform tasks of inspection/surveillance and reparation reducing the high costs of these activities favoring regional renewable energy production conditions. The IRSg at ISR was focussed on solar farms, and its role was to be in charge of developing and deploying methodologies towards a scenario where aerial robots search for defects in solar panels, calling a ground robot to inspect the defect from a closer distance when necessary. To keep the team autonomously running for significant time, the aerial robots can land in ground robots with charging stations.
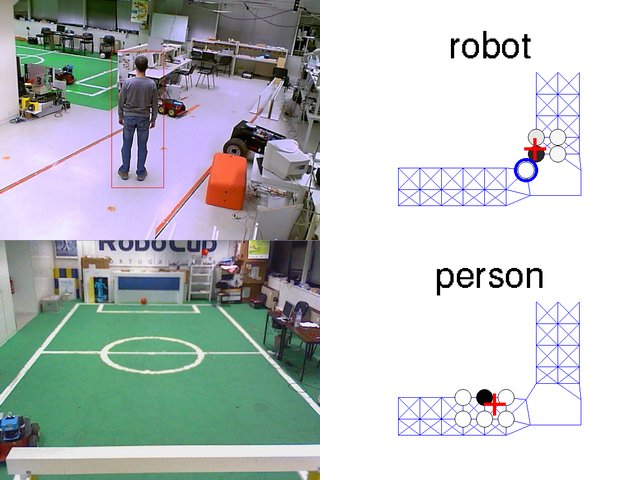
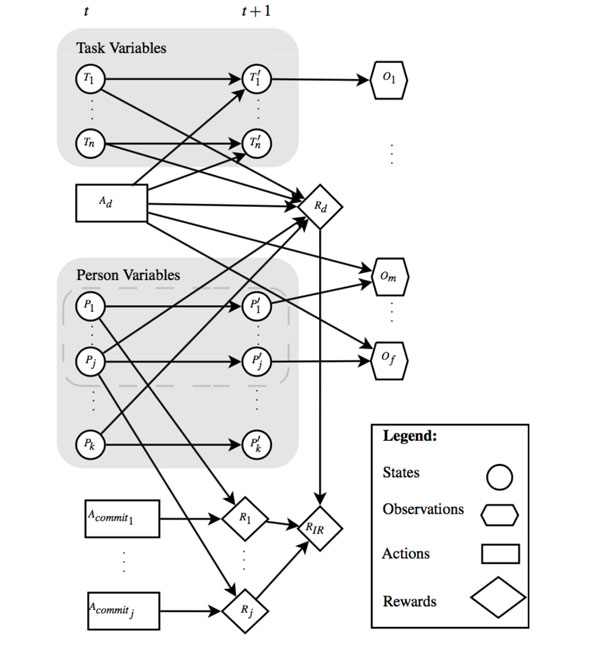
The URUS project will be focussed in designing a network of robots that in a cooperative way interact with human beings and the environment for tasks of assistance, transportation of goods, and surveillance in urban areas. Specifically, our objective is to design and develop a cognitive network robot architecture that integrates cooperating urban robots, intelligent sensors, intelligent devices and communications. Among the specific technology that will be developed in the project, there will be: navigation coordination; cooperative perception; cooperative map building; task negotiation; human robot interaction; and wireless communication strategies between users (mobile phones), the environment (cameras), and the robots. Moreover, in order to make easy the tasks in the urban environment, commercial platforms that have been specifically designed to navigate and assist humans in such urban settings will be given autonomous mobility capabilities. Proof-of concept tests of the systems developed will take place in a car free area of Barcelona. The initiative of this project comes from the European Group inside of the Research Atelier on Network Robot Systems (a European project) which is producing a Roadmap of Network Robots in Europe.
This project aimed at endowing a team of outdoors robots with cooperative navigation capabilities, so as to demonstrate the ability of the robots to act individually and cooperatively in search and rescue-like operation scenarios. Search and Rescue (SAR) operations are a challenging application for Robotics since, due to their nature, they naturally foster advances in Artificial Vision, Navigation in outdoors unstructured environments, Distributed Artificial Intelligence and Intelligent Control.
The long-term objectives of the project consist of applications to SAR under large-scale catastrophe scenarios, namely after an earthquake. However, the project was focused on the first steps towards the long-term goal and, as such, it referred to simpler scenarios and was based on some simplifying hypotheses, such as daylight operation and pre-planned robotic tasks. Also, the robotic team included only 2 robots, purposively made heterogeneous, both regarding the functional, hardware and software architectures: one wheeled and one aerial robot. Therefore, each type of robot could be assigned tasks with different requirements under SAR operations.
The following is a list of problems that were, at least partially, addressed during the project:
- Definition of functional and software architectures suitable for the integration of the subsystems composing the robotic team, oriented towards SAR applications.
- Issues concerning topological, world-model-based and sensor-based navigation within unstructured environments, as well as their extension to cooperative navigation, where 2 robots communicate with each other to share information relevant for team navigation improvement.
- Aerial robot autonomous guidance.
This project was funded by the Fundação para a Ciência e a Tecnologia (FCT) under the contract SRI/32546/99-00, and involved ISR/IST VisLab as well.

In the context of the previously referred Rescue project, research on localization and map building using a land vehicle was carried out. In particular, SLAM techniques were used to build a topological map, as well as navigating along such a map. Topological maps differ from traditional metric maps in the fact that they represent topological relations among landmarks, rather than their exact coordinate position. Maps of urban subways are a classic example of such a map, as for traveling in a subway, the geographical relative positioning among stations is irrelevant. In the case of a SAR robot, cooperating with human teams, it is in general more efficient to communicate using landmark positions, instead of geographical coordinates.

The RAPOSA robot is a tracked wheel robot build in cooperation with the Portuguese company IDMind, a ISR spinoff, together with the Lisbon firefighters corporation and the University of South Florida. This project comprised the design and construction of a tracked wheels robot, for the use in SAR operations. The input that the Lisbon firefighters provided was essential for the specification of the platform.
This project was funded by the Agência da Inovação (AdI).
Original project link: http://raposa.idmind.pt (hosted at IDMind since they were the consortium leaders)
Following the initial design of the robot, two avenues of research were explored:
- autonomous behaviours, following the principle of adjustable autonomy, certain specific tasks were automated, namely (1) autonomous docking to the cable (this robot is capable of attaching a cable providing power and a wireless link access point; is cable is also strong enough to lift the robot up), and (2) autonomous stair climbing as this robot was mechanically designed to be able to climb standard stairs;
- immersive teleoperation using augmented reality on a Head Mounted Display (HMD) using the camera pairs to feed stereo video, and thus providing the operator with depth perception of the environment surrounding the robot; this was the topic of the research project AuReRo.
Current research proceeds on studying effective methods to improve the teleoperation immersiveness, namely exploring the development haptic interfaces.
Aerial robots are capable of providing invaluable contribution for a cooperative team of robots, first because they can carry cameras and thus sending video stream captured from an altitude position, but also because they may be capable of mapping the terrain. These maps can then be used by land vehicles for navigation.

Research using a particular kind of aerial robot — a blimp — has being carried out at ISR, namely on these issues:
- providing the aerial 4m-long blimp robot with full indoors operation autonomy (from a technological standpoint), by endowing it with onboard computational power (based on a DSP), a video-camera, a video transmitter, NiCad batteries and a GPS device. All these but the GPS installation have been successfully accomplished so far. The DSP includes a video acquisition board and supports image processing plus guidance and control code. Connection to a GPS device is also possible, but not yet implemented. The onboard video transmitter is used to provide real-time image processing feedback (e.g., useful for debugging purposes) to the ground operator, who can also gain remote manual control of the robot whenever found appropriate;
- realistically simulating the aerial blimp and land ATRV-Jr robots, based on USARSim, such that developed code can be tested on the simulator and then switched to the actual blimp hardware without needing any extra modifications. Actually, control of the actual hardware and of the simulated blimp model can also be carried out simultaneously, if so desired;
- developing and testing vision-based algorithms for ground-lines following and object tracking (e.g., the ATRV-JR land robot) by the aerial blimp robot.
Aerial robots are capable of providing invaluable contribution for a cooperative team of robots, first because they can carry cameras and thus sending video stream captured from an altitude position, but also because they may be capable of mapping the terrain. These maps can then be used by land vehicles for navigation.
The group is started working with aerial drones, mostly quadcopters, in straight collaboration with IST spinoff UAVision, namely through the co-supervision of several MSc theses and in the QREN project Quadmission. Over the years we have now developed several different quadcopters, including multimodal drones (capable of flying, rolling on the ground and climbing walls), and use them for case studies in cooperative perception and mapping, as well as in actual real world applications, such as those developed under the project Aero.Next..
References
- Henrique Martins, I. Oakley , Rodrigo Ventura, Design and evaluation of a head-mounted display for immersive 3-D teleoperation of field robots, Robotica, Cambridge University Press, 2014
- Rodrigo Ventura, Two Faces of Human–Robot Interaction: Field and Service Robots, in New Trends on Medical and Service Robots: Challenges and Solutionsts, Mechanisms and Machine Science, Springer, Vol. 20, pp. 177-192 , 2014
- D. Amorim , Rodrigo Ventura, Towards efficient path planning of a mobile robot on rough terrain, Proc. of ICARSC 2014 – IEEE International Conference on Autonomous Robot Systems and Competitions, Espinho, Portugal, pp. 18-22, 2014
- F. Jesus , Rodrigo Ventura, Combining monocular and stereo vision in 6D-SLAM for the localization of a tracked wheel robot, Proc. of SSRR 2012 – 10th IEEE International Symposium on Safety, Security, and Rescue Robotics, College Station, TX, USA, 2012
- P. Vieira , Rodrigo Ventura, Interactive mapping in 3D using RGB-D data, Proc. of SSRR 2012 – 10th IEEE International Symposium on Safety, Security, and Rescue Robotics, College Station, TX, USA, 2012
- J. Mendes , Rodrigo Ventura, Safe teleoperation of a quadrotor using FastSLAM, Proc. of SSRR 2012 – 10th IEEE International Symposium on Safety, Security, and Rescue Robotics, College Station, TX, USA, 2012
- Rodrigo Ventura, Pedro Lima, Search and rescue robots: The civil protection teams of the future, Proc. of EST 2012 – 3rd International Conference on Emerging Security Technologies, pp. 1219, Lisbon, Portugal, 2012
- Rodrigo Ventura, Jorge Ferraz, Robust Autonomous Stair Climbing by a Tracked Robot Using Accelerometer Sensors, Proc. of CLAWAR 2009 – 12th International Conference on Climbing and Walking Robots, Istanbul, Turkey, 2009
- Fausto Ferreira, Rodrigo Ventura, Autonomous docking of a tracked wheels robot to its tether cable using a vision-based algorithm, Workshop on Robotics for Disaster Response, ICRA 2009 – IEEE International Conference on Robotics and Automation, Kobe, Japan, 2009
- Appearance based landmark selection and Reliability Evaluation for Topological Navigation, Lorenz Gertsmayr, Alexandre Bernardino, José Santos-Victor, Proc. IAV 2004 – 4th IFAC/EURON Symposium on Intelligent Autonomous Vehicles, Lisbon, Portugal, 2004
- Feature Extraction and Selection for Mobile Robot Navigation in Unstructured Environments, Alberto Vale, José Miguel Lucas, M. Isabel Ribeiro, Proc. IAV 2004 – 5th IFAC/Euron Symposium on Intelligent Autonomous Vehicles, Lisbon, Portugal, 2004
- Agent-Based Software Architecture for Multi-Robot Teams, João Frazão, Pedro Lima, Proc. IAV 2004 – 5th IFAC/EURON Symposium on Intelligent Autonomous Vehicles, Lisbon, Portugal, 2004
- Navigation Controllability of a Mobile Robot Population, Francisco Melo, M. Isabel Ribeiro, Pedro Lima, Proc. RoboCup 2004 Symposium, Lisbon, Portugal, 2004
- Bayesian Sensor Fusion for Cooperative Object Localization and World Modeling, Pedro Pinheiro, Pedro Lima, Proc. 8th Conference on Intelligent Autonomous Systems, IAS-8, Amsterdam, The Netherlands, 2004
- Logic Based Hybrid Decision System for a Multi-robot Team, Vasco Pires, Miguel Arroz, Luís Custódio, Proc. 8th Conference on Intelligent Autonomous Systems, Amsterdam, The Netherlands, 2004
- Event-driven Modelling and Control of a Mobile Robot Population, Francisco Melo, Pedro Lima, M. Isabel Ribeiro, Proc. IAS8 – 8th Conference on Intelligent Autonomous Systems, Amsterdam, The Netherlands. pp. 237-244, 2004
- Flugregler für ein autonomes Luftschiff (, Thomas Krause, Pedro Lima, Peter Protzel, Proc. German Conference on Autonomous Mobile Systems, Karlsruhe, Germany, 2003
- Environment Mapping as a Topological Representation, Alberto Vale, M. Isabel Ribeiro, Proc. of ICAR2003 – 11th International Conference on Advanced Robotics, Coimbra, Portugal, Vol. 1, pp.29-34, 2003
- The RESCUE Project: Cooperative Navigation for Rescue Robots, Pedro Lima, Luís Custódio, M. Isabel Ribeiro, José Santos-Victor, Proceedings do 1st International Workshop on Advances in Service Robotics, ASER’03, Bardolino, Itália, pp. 94-101, 2003 – PDF
- A Probabilistic Approach for the Localization of Mobile Robots in Topological Maps, Alberto Vale, M. Isabel Ribeiro, Proceedings da 10th IEEE Mediterranean Conference on Control and Automation, Lisbon, Portugal, 2002
- Hybrid abstractions: A search and rescue case study, P. Tabuada, G. J. Pappas, Pedro Lima, Proc. ECC2001 – European Control Conference, Porto, Portugal, 2001





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}